路径奇异点的处理
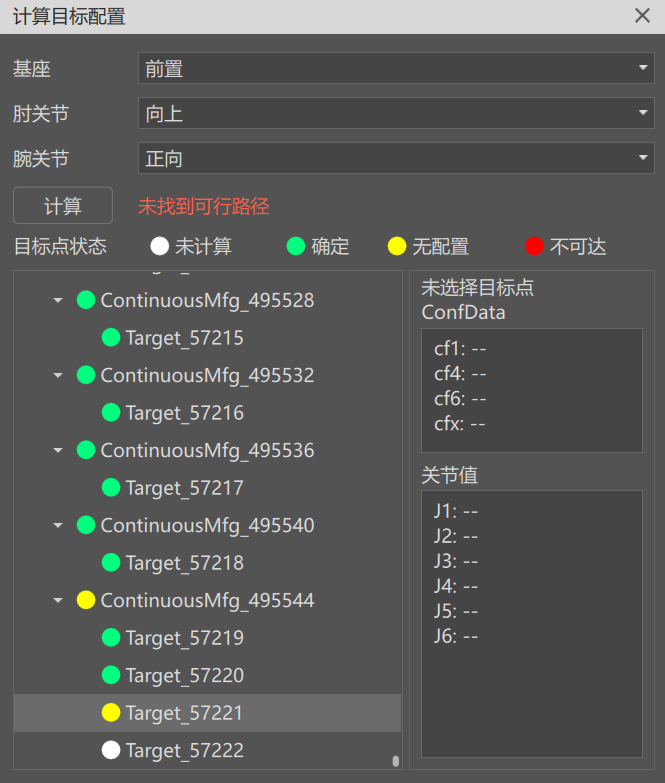
生成了工序路径之后,计算路径配置时有可能发现有些目标点的配置是奇异配置,导致路径不可行。 这里介绍几种处理奇异点的常用方法。
自动优化
路径优化功能能够帮助用户自动方便的调整目标点围绕Z轴旋转的姿态。
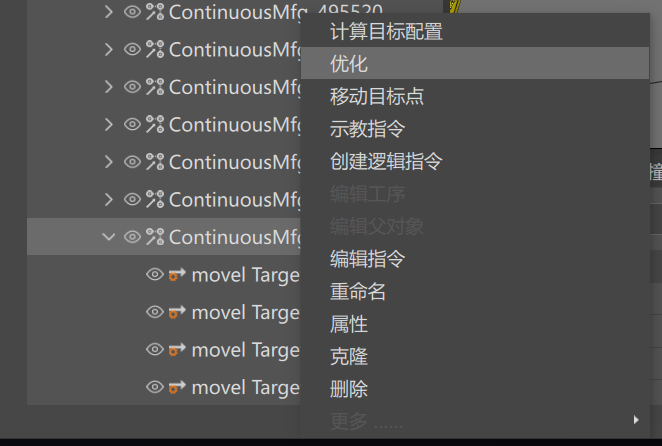
路径优化功能由工序右键菜单打开。
路径优化界面主要由一个二维可视化区域组成。
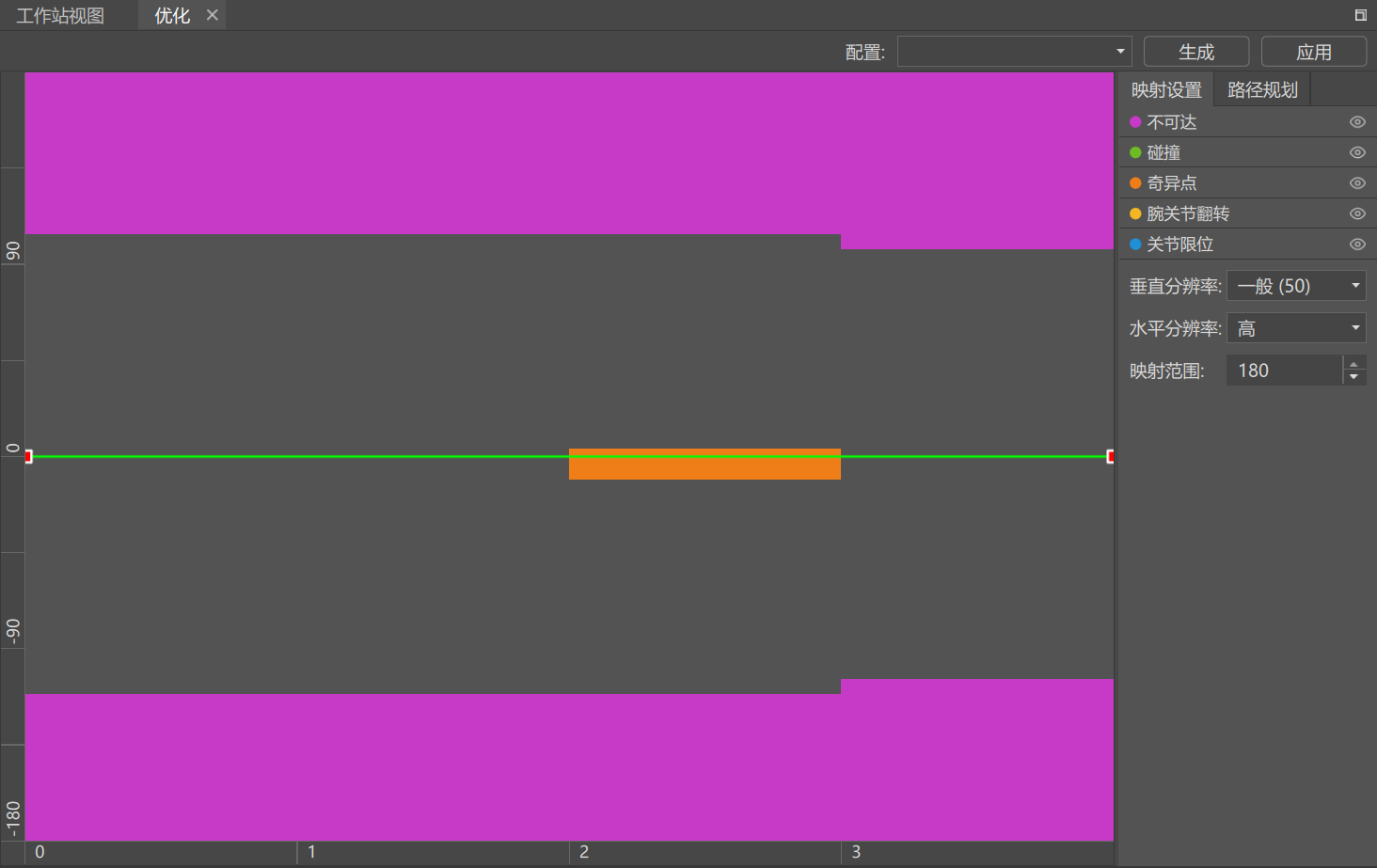
可视化区域的横坐标对应于工序中的所有目标点,纵坐标对应于目标点围绕Z轴旋转的角 度。横线代表各个目标点当前围绕Z轴旋转的角度。
可视化区域如果没有色块,说明该目标在该位置对应的绕Z轴旋转角度时是可行的。如果有 色块,说明该目标点在该位置对应的绕Z轴旋转角度时是不可行的。具体的不可行原因由色 块的颜色标出。每种颜色对应的原因在右侧列出。
在这个例子中我们可以看到第3个目标点的0转动角度附近出现了奇异点色块,表示该目标点在当前的姿态下 是处于奇异点,这与之前路径配置计算的结果一致。
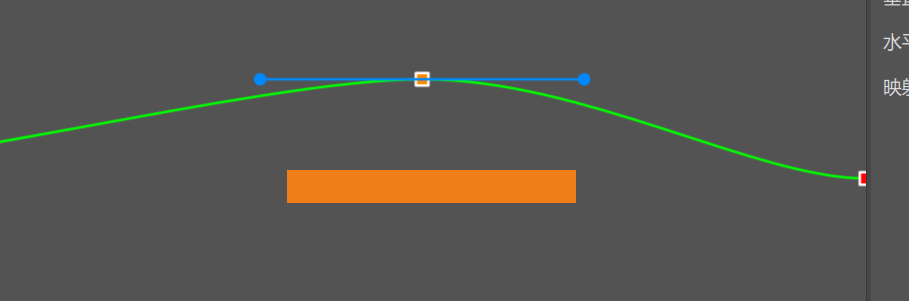
路径优化功能的方便之处在于允许用户拉动目标点对应的曲线,以可视化的方式调整目标点的绕Z轴旋转的姿态,让目标点 脱离奇异点姿态。注意这里仅调整目标点围绕Z轴旋转的姿态,不改变目标点的位置。
在默认情况下只有首尾2个可调整点。因为我们要调整的是第3个点,需要在色块对应的区域附近添加一个可调整点。

添加可调整点之后,用鼠标将其拖离色块区域,让曲线和色块不相交,这样表示用户希望让 目标点绕Z轴旋转的角度对应于曲线经过的区域。
点击“生成”按钮,让系统计算在当前曲线对应的各个目标点旋转角度下面,整条路径的可行配置。

可以看到已经有了可行配置。
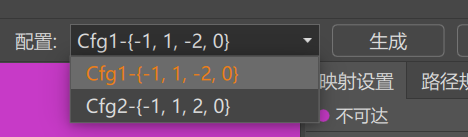
选择一个配置并点击“应用”按钮,将曲线对应的旋转角度应用到路径的各个目标点上。

回到工作站视图,可以发现目标点已经绕Z轴旋转了。此时再次对工序进行目标点配置计 算,发现路径已经可行。
手动调整目标点位姿
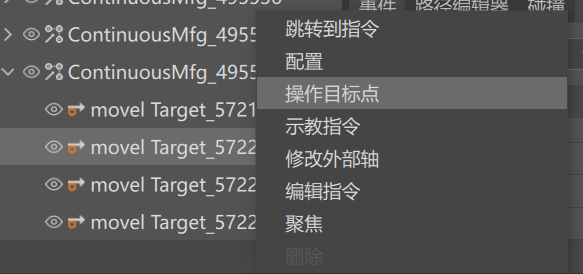
如果对目标点的位姿有比较明确的调整办法,也可以通过奇异目标点进行直接的手动调整。 通过该指令的右键菜单打开目标点操作面板。
在目标点操作面板中,可以手动对目标点进行平移和旋转调整。调整之后重新进行路径配置 计算,以查看调整效果。
通过示教添加替换指令
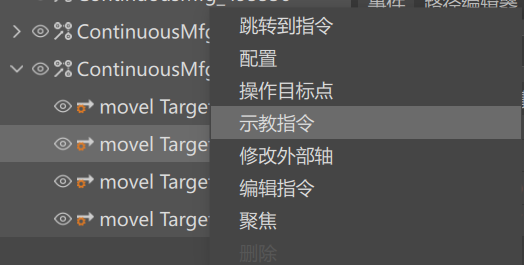
如果对目标点的位姿没有明确的调整办法,可以通过示教功能添加替换指令。 通过最后一个可行点的工序右键菜单打开示教界面。
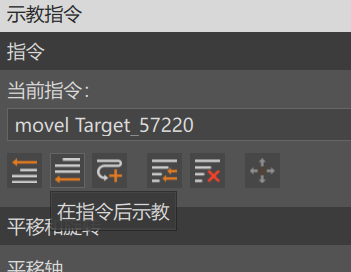
通过手柄拖拽机器人工具到合适位置后,点击“在指令后示教”按钮,将当前工具位置添加到 工序中。
然后删除奇异点指令,重新计算路径配置。