当点击活动栏中的控制器图标时,左侧面板将显示控制器面板。控制器面板以树状显示工作站中存在的所有机器人的虚拟控制器。
控制器面板中显示的对象及其对应的操作菜单有:
| 对象类型 | 操作菜单 |
|---|---|
| 控制器 | 修改任务坐标系 |
| 任务 | 配置机械单元组 |
| 机械单元组 | 编辑机械单元组 |
| 机械单元组 | 添加机械单元 |
| 机械单元 | 创建机械单元 |
| 机械单元 | 删除机械单元 |
修改任务坐标系
可以通过控制器类型对象的右键菜单修改任务坐标系的位置。
控制器中定义和使用的所有坐标都相对于任务坐标系定义。例如,机器人和外部轴的基坐标系,程序中使用的工件坐标系。
设置任务坐标系对话框如下图:
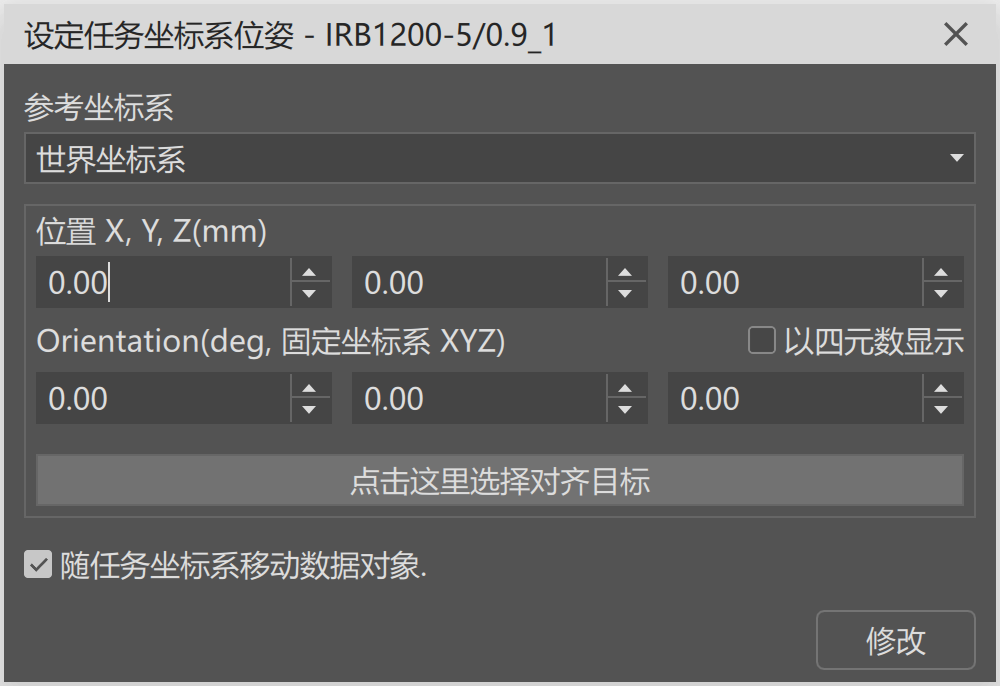
界面说明:
- 参考坐标系 选择参考坐标系,位置和方向的值为相对于选择的参考坐标系的。
- 位置 设置任务坐标系的原点位置坐标(X, Y, Z),数值基于所选参考坐标系。
- 方向 设置任务坐标系的朝向角度,数值基于所选参考坐标系,可以选择使用欧拉角表示或者四元数表示。
- 选择对齐目标 选择需要对齐的目标对象,用于快速设置任务坐标系的位置和方向。
- 随任务坐标系移动数据对象 勾选后,当修改任务坐标系的位置或方向时,所关联的数据对象(如轨迹点、工件模型等)将随之同步移动或旋转,保持相对关系不变。
- 修改 确认并应用所有更改。
配置机械单元组
可以通过任务类型对象的右键菜单配置机械单元组。
配置任务的机械单元组的对话框如下图:
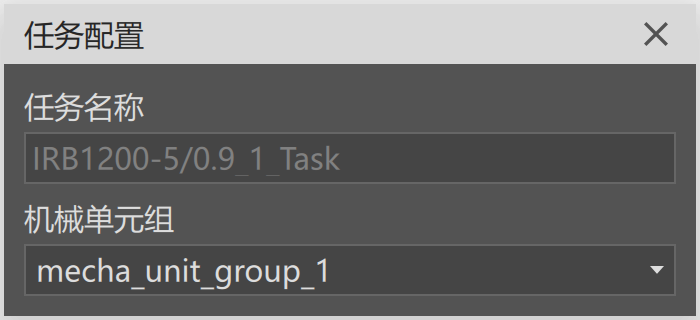
- 任务名称 该任务的名称
- 机械单元组 该任务使用的机械单元组的名称
编辑机械单元组
可以通过机械单元组类型对象的右键菜单编辑该机械单元组。 编辑机械单元组的对话框如下图:
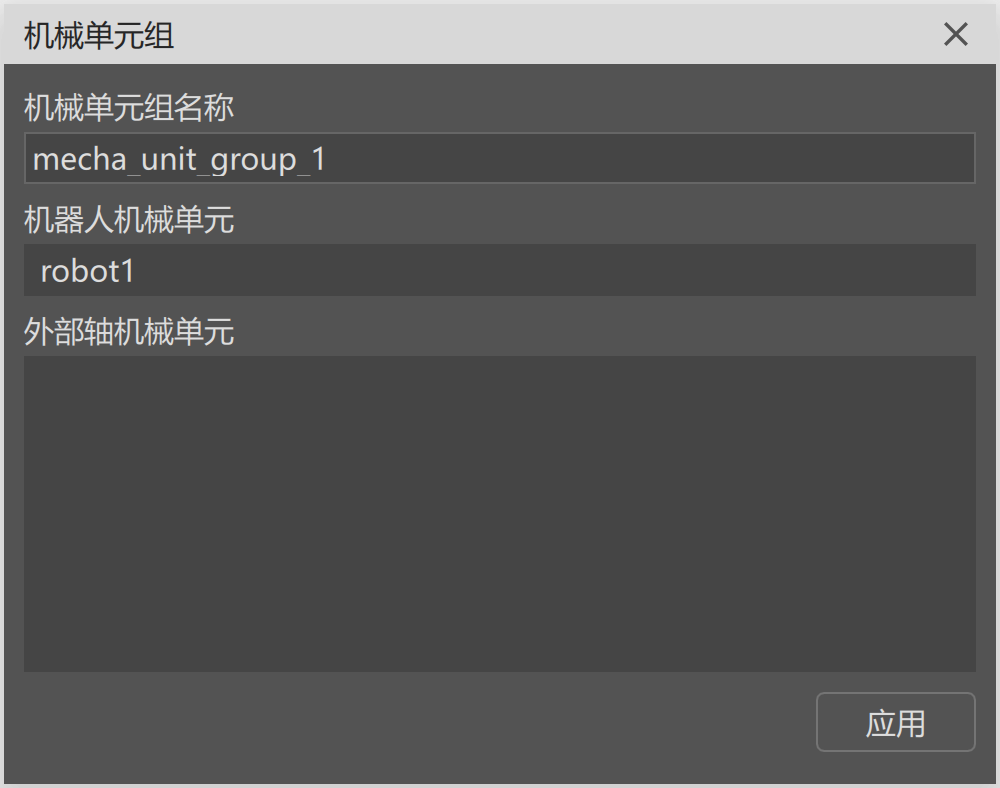
- 机械单元组名称 该机械单元组的名称。可以修改此名称。
- 机器人机械单元 该机械单元组中的机器人机械单元,目前不支持修改。
- 外部轴机械单元 该机械单元组中的所有外部轴机械单元。
在外部轴机械单元列表中,列出了已经添加到该机械单元组的机械单元,每个单元支持以下操作:
- 设置激活状态: 设置机械单元的激活状态,只有激活的机械单元才参与后续的控制与运动规划。一个机械单元组 里最多只允许激活一个外部轴导轨单元和一个其他类型的外部轴机械单元(如变位机),激活的机械单元之间不 能有相同的逻辑轴。
- 删除: 将该机械单元从当前机械单元组中移除。
添加机械单元到机械单元组
可以通过机械单元组类型对象的右键菜单添加机械单元到该机械单元组。
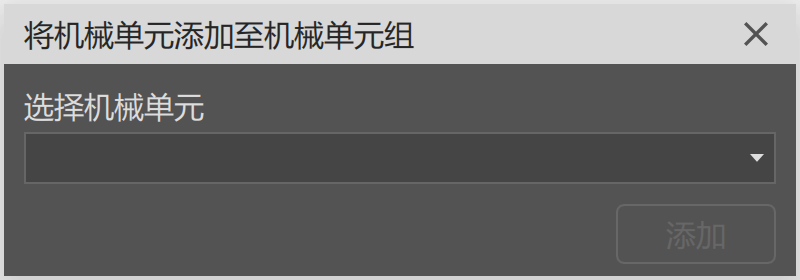
添加机械单元的对话框如下图:
-
选择机械单元 通过下拉菜单列出当前控制器可用的机械单元,并选择要添加的机械单元。
-
添加 点击后将选中的机械单元添加到机械单元组里。
机械单元右键菜单
创建机械单元
机械单元名称
设置待创建的机械单元的名称。
选择机械臂或外部轴
选择待创建的机械单元类型及具体型号:
-
使用机器人:创建机器人机械臂单元,从可用的机器人型号列表中选择。
-
使用外部轴:创建外部轴机械单元(如导轨、变位机等),从可用的外部轴型号列表中选择。
当前版本仅支持创建外部轴机械单元。
安装坐标系
指定该机械单元的安装参考坐标系,从可用的坐标系列表中选择。
关节配置
配置机械单元的逻辑轴与设备物理轴之间的映射关系。列表中包含:
索引号:选中的设备的物理轴序号。
逻辑轴:映射到逻辑轴的序号。支持自定义配置。
基坐标系
显示机械单元基坐标系姿态,不可编辑。
创建
根据设置参数完成机械单元创建。
编辑机械单元
修改已经创建的机械单元。可修改名字和逻辑轴与设备物理轴之间的映射关系。
对于已经加入到机械单元组并激活的机械单元,只允许修改名字。
删除
删除选中的机械单元。不能删除已经加入到机械单元组的机械单元。
信号
控制器可以创建输入和输出信号,以配合智能组件进行仿真。
左键单击信号节点,可在中央区域打开该控制器的信号表格面板。
新建信号
指定信号的类型和名称,创建信号。
删除信号
在表格行上点击右键,选择"删除",可删除对应的信号。
信号表格面板
信号表格面板列出一个虚拟控制器的所有信号。
Tenon代码
在Tenon代码节点下列出了控制器中所有的任务及其程序模块。每个Tenon模块对应一个源代码文件。
删除模块
模块节点的右键菜单可以删除该模块。
注意,当任务中所有模块都被删除后,任务的编译会失败。在有任务编译失败的情况下,不能运行仿真。
代码编辑器
左键单击模块节点,在中央区域打开代码编辑器。
编辑代码时,ctrl-s键保存代码,并自动触发任务的编译。