入门指南
概述
Manipula 是一款面向工业机器人编程与仿真的CAM软件。本指南将引导您完成从导入机器人到仿真路径运动的完整 入门流程。
导入机器人
-
启动软件 :打开Manipula软件,创建新项目或打开现有项目
-
打开导入机器人面板:
-
选择“基本”工具栏
-
点击“导入机器人”工具栏按钮;
-
选择机器人品牌:点击“导入机器人”面板左侧的品牌logo,展示对应品牌下的机器人;
-
进行负载过滤:输入最小负载和最大负载,点击"过滤"按钮筛选出当前品牌下符合负载范围的机器人家族;
-
选择机器人家族:点击机器人缩略图按钮,打开对应机器人家族的导入对话框;
-

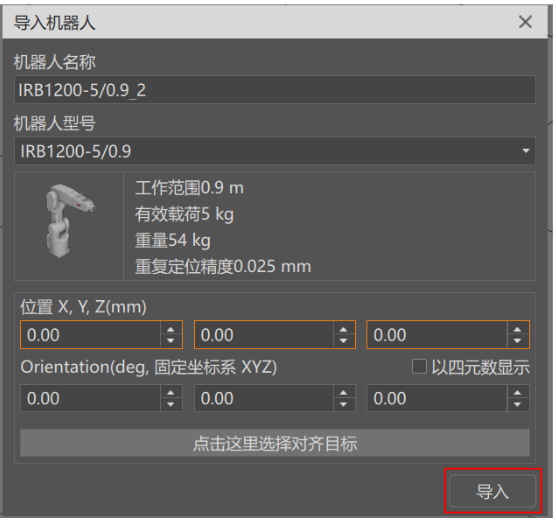
- 导入机器人:输入机器人名称、选择机器人型号、设置初始导入位姿后,点击“导入”按钮导入设定好的机器人 模型。
创建一个通用工序
工序是机器人编程的核心环节,它定义了机器人执行任务的具体运动轨迹。
- 打开创建通用工序面板:选择“工艺”工具栏,点击“手动工序”工具栏按钮,选择“创建通用工序”,打开“创建通用工序”对话框

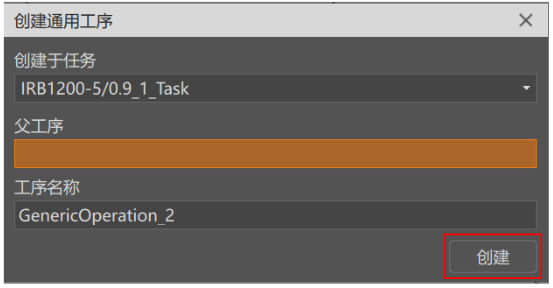
- 创建通用工序:选择工序所属任务,选择“父工序”(可选),输入工序名称,点击“创建”按钮,创建一个空的通用工序 GenericOperation_1;
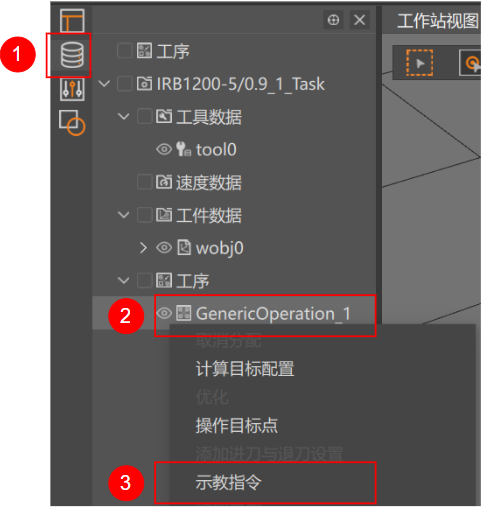
- 打开示教指令面板:切换到“任务数据”树形面板,右键点击通用工序GenericOperation_1,选择“示教指令”,打开“示教指令”对话框;
- 通过“平移和旋转”、“关节点动”、“设定Tcp位姿”的方式改变机器人Tcp点位姿,然后设定指令参数、点击示教。 可重复此过程创建多条指令

计算目标点配置
计算目标点配置用于为工序中的所有指令目标点计算并设置配置数据(confdata)。配置数据决定了机器人以何种 姿态到达目标点。
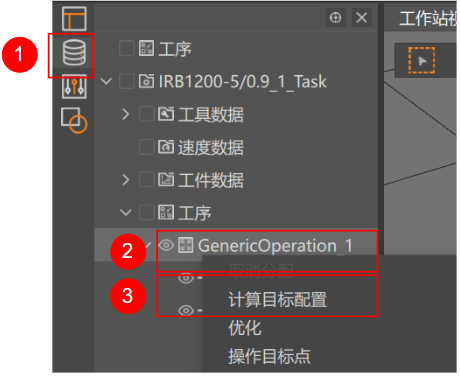
- 打开计算目标点配置面板:在"任务数据"树形面板中,右键点击通用工序GenericOperation_1,选择"计算目标 点配置";
-
计算并应用配置
-
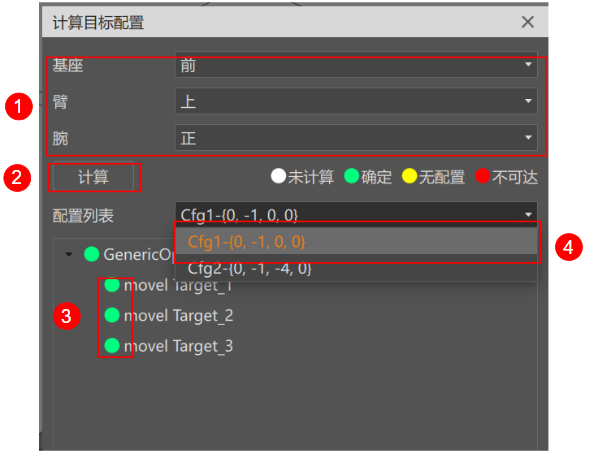
设置配置数据:配置数据包含三个维度,用于确定机器人到达目标点的姿态。
- 基座:腕中心相对于1轴的位置,决定机械臂朝前/朝后的姿态:
- 前:腕中心在1轴前面,机器人呈朝前姿态
- 后:腕中心在1轴后面,机器人呈朝后姿态
- 肘:腕中心相对于3轴的位置,决定机械臂肘部的弯曲状态:
- 上:腕中心在3轴前面,肘部向上弯曲
- 下:腕中心在3轴后面,肘部向下弯曲
- 腕:5轴的角度,决定腕关节的旋转方向:
- 正:5轴角度为正时,腕关节正向旋转
- 负:5轴角度为负时,腕关节负向旋转
- 基座:腕中心相对于1轴的位置,决定机械臂朝前/朝后的姿态:
-
计算配置数据:点击"计算"按钮,系统会计算工序中所有指令目标点的可行配置数据,并在列表中显示所有可 行的配置选项;
-
查看目标点配置状态:列表中会按照顺序列出工序中的所有目标点,每个目标点前面会显示一个圆形色块表示 配置状态,共有四种状态:
-
未计算(白色):表示未计算该目标点的配置
-
确定(绿色):表示有可用配置
-
无配置(黄色):表示该目标点没有可用配置
-
不可达(红色):表示该目标点不可达
-
-
选择并应用配置:从列表中选择合适的配置数据,将配置应用到目标点。
-
仿真
完成目标点配置后,可以通过路径编辑器和仿真功能验证机器人的运动路径。
-
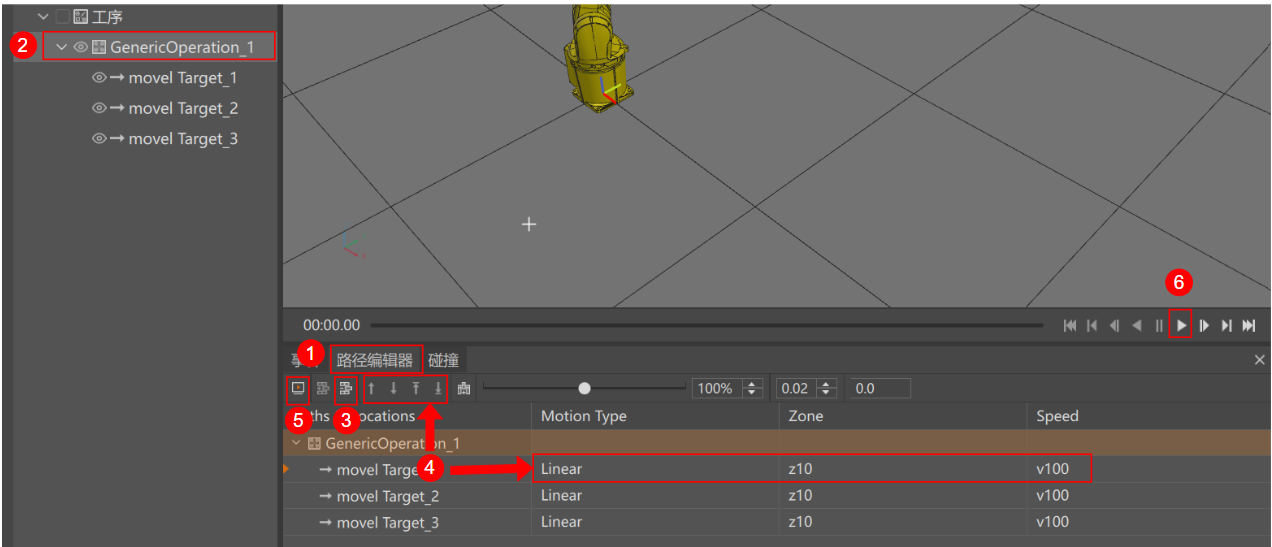
在底部面板中选择“路径编辑器”切换到路径编辑器面板。
-
在"任务数据"树形面板中选中通用工序GenericOperation_1。
-
点击路径编辑器里的“添加路径到编辑器”按钮。
-
编辑工序:选中工序的指令后可通过“向上移动”,“向下移动”,“移动到顶部”,“移动到底部”按钮调整指令的 顺序。可通过列表里的“Motion Type”,“Zone”,“Speed"下拉列表修改对应的参数。
-
规划路径:点击路径编辑器的“规划所有指令以激活仿真”按钮,如果规划成功,则会弹出仿真工具条,如果规 划失败,会在事件面板报告事件,可切换到事件面板查看,根据事件类型修改指令,然后重新计算目标点配置 并规划路径。
-
运行仿真:点击仿真工具条的“运行仿真”按钮即可进行仿真。支持拖动仿真工具条的滑块查看机械臂在指定时 间点的姿态,也可以点击“返向运行仿真”,“步进仿真”等按钮进行仿真。